Open Knowledge for AI-Enabled Robots

During the experiments, comprehensive data about episodes, in which humans and robots perform complex manipulation tasks is logged into a big data database.
Knowledge in openEASE is grounded in this database and includes information about when, why and how an action was performed, what effects the action had and what the belief state of the robot looked like during the performance.
The knowledge base can be explored by asking queries formulated in prolog, which is a logic programming language allowing declarative programming and is well-suited for knowledge-intensive applications. For an introduction into Prolog, visit http://www.learnprolognow.org/.
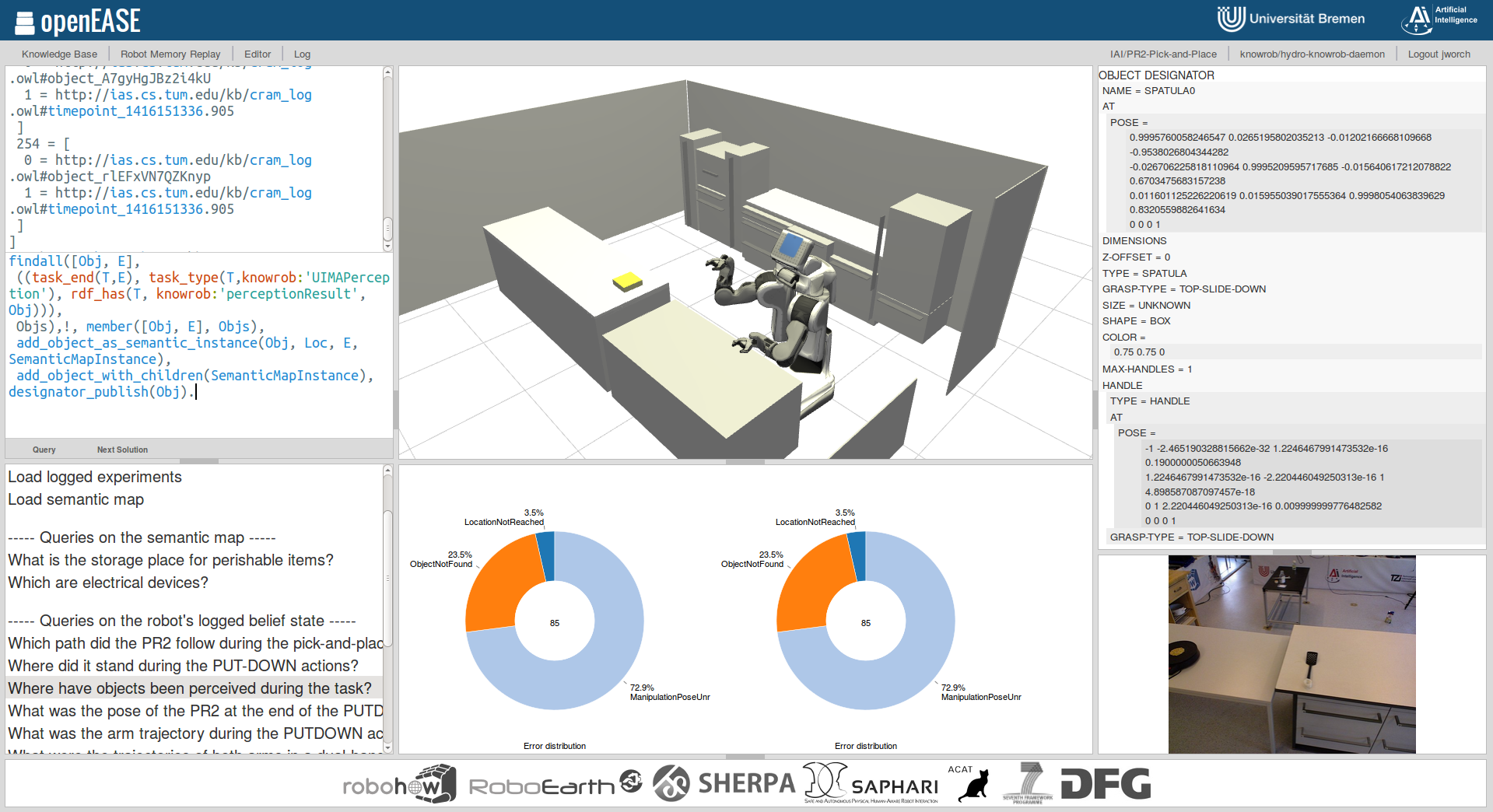
For now, the provided example queries help getting started with the interface and demonstrate how experiment data can be accessed. Different types of information can be queried, such as information about the semantic map of the robot’s environment and the objects in it, the robots belief state or simulation data. The results will be shown in textual form and can be visualized in the 3D visualization pane in some cases. Snapshots from the perception system of the robot are shown in the belief pane, statistics about the experiment itself in the statistics pane.
The recorded robotic experiments can be accessed on the main page. There is a number of different knowledge base experiments available such as “Long-term fetch & place”, in which an autonomous robot was recorded setting a table or “Acquiring everyday manipulation skills through games” in which robots flip a pancake or fish a sausage out of a cooking pot.
You can start to work with the data, by selecting one of the Knowledge Base Experiments. Before you can access them, you need to register for an account at no charge. The registration link can be found in the main menu of the webpage.
If you’d like to get more information about what openEASE is and what kind of information it provides, have a look at our introduction video below or try out the interactive tutorial to get a general idea of how to use the tools provided on this website.